軟體機器人從獵豹和馬林魚身上獲取特徵

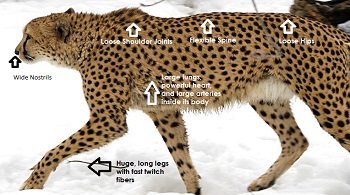
北卡羅來納州立大學機械和航空航天工程助理教授 Jie Yin 博士開發了一種名為 LEAP(利用彈性不穩定性提高性能)軟機器人的設備。該設備不僅可以在陸地上使用(以舉例說明獵豹的奔跑方式),還可以在水下使用以顯著提高機器魚的速度。此外,LEAP Softbot 甚至可以模仿馬林魚(最快的海洋游泳者之一,平均時速約為 50 英里/小時)游泳。有時,甚至每小時 68 英里!軟體機器人之所以能從這兩種動物身上獲得速度特性,都是因為它的“雙穩態”脊柱。這意味著脊柱要么是一種形式,要么是另一種形式。例如,它要么像圓頂一樣向外彎曲,要么像碗一樣向內彎曲。像這樣的形狀允許軟體機器人採取更長更快的步伐,從而以更快的速度覆蓋更多的距離。這種機制的進一步發展可以在假肢等領域為我們提供幫助!
獵豹的適應:
馬林魚示意圖: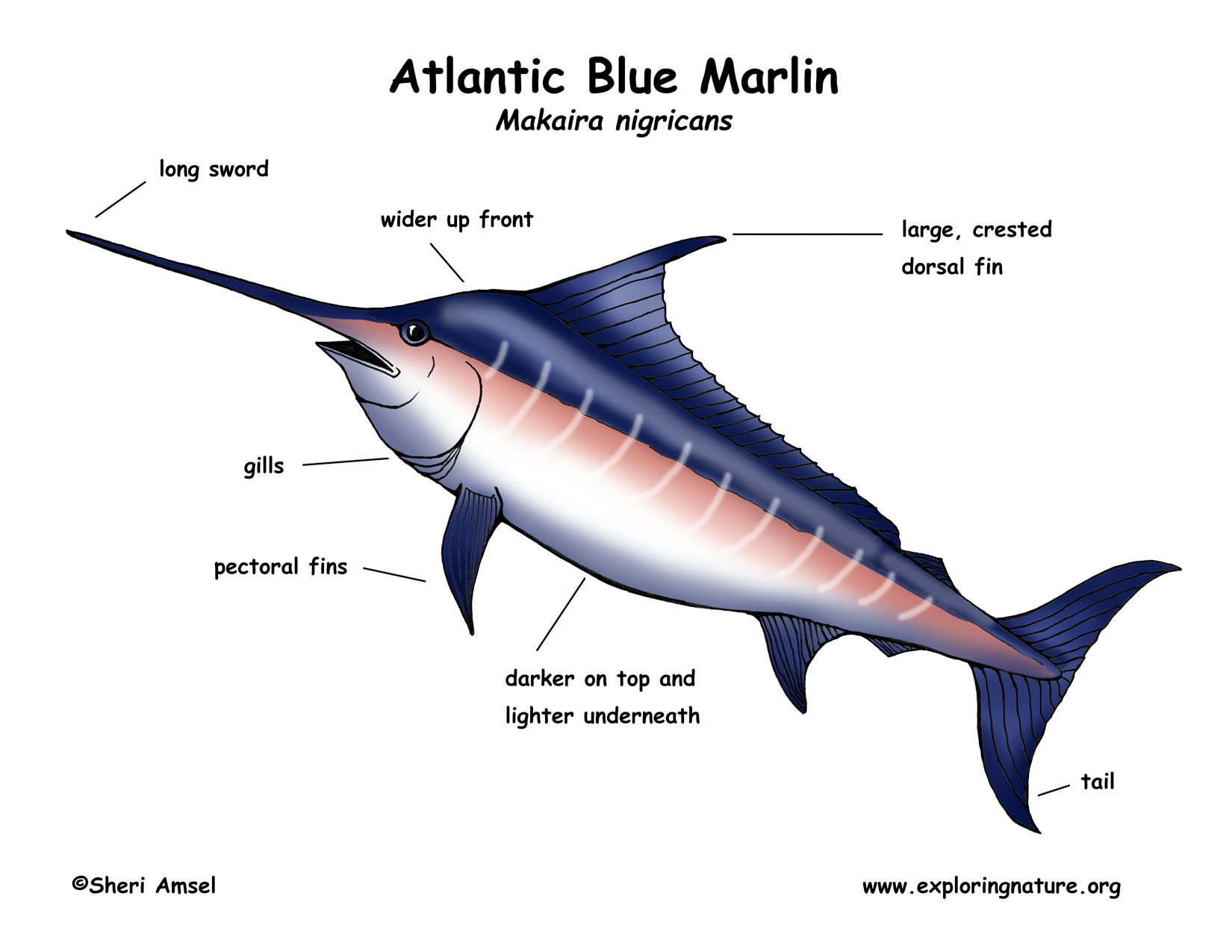
資料來源:
- https://www.engadget.com/soft-cheetah-robot-flexible-spine-ncsu-180005178.html
- https://blog.padi.com/2015/11/16/the-fastest-fish-in-the-ocean/
下面是一個演示如何 LEAP軟體機器人 與其他設計不同。




回應