Soft Robot Obtains Characteristics from Cheetahs and Marlins

Dr. Jie Yin, an assistant professor of mechanical and aerospace engineering at North Carolina State University, developed a device called the LEAP (Leveraging Elastic instabilities for Amplified Performance) Softbot. This device can not only be used on land (to exemplify the running style of a cheetah), but it can also be used underwater to dramatically increase the speed of robotic fish. Moreover, the LEAP Softbot can even imitate how marlins (one of the fastest marine swimmers averaging around 50 mph) swim. Sometimes, even 68 mph! The reason why the softbot obtains the speed characteristic from these two animals, is all because of its “bistable” spine. This means that the spine is either in one form or the other. For example, it is either curved out like a dome, or curved in like a bowl. Being shaped like this allows the softbot to take longer and faster strides, therefore covering more distance at a quicker pace. The further developments of this mechanism can help us in areas such a prosthetics and more!
Adaptations of a Cheetah:
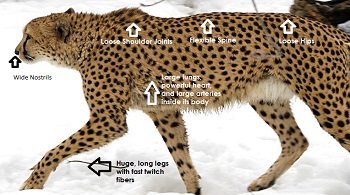
Diagram of a Marlin: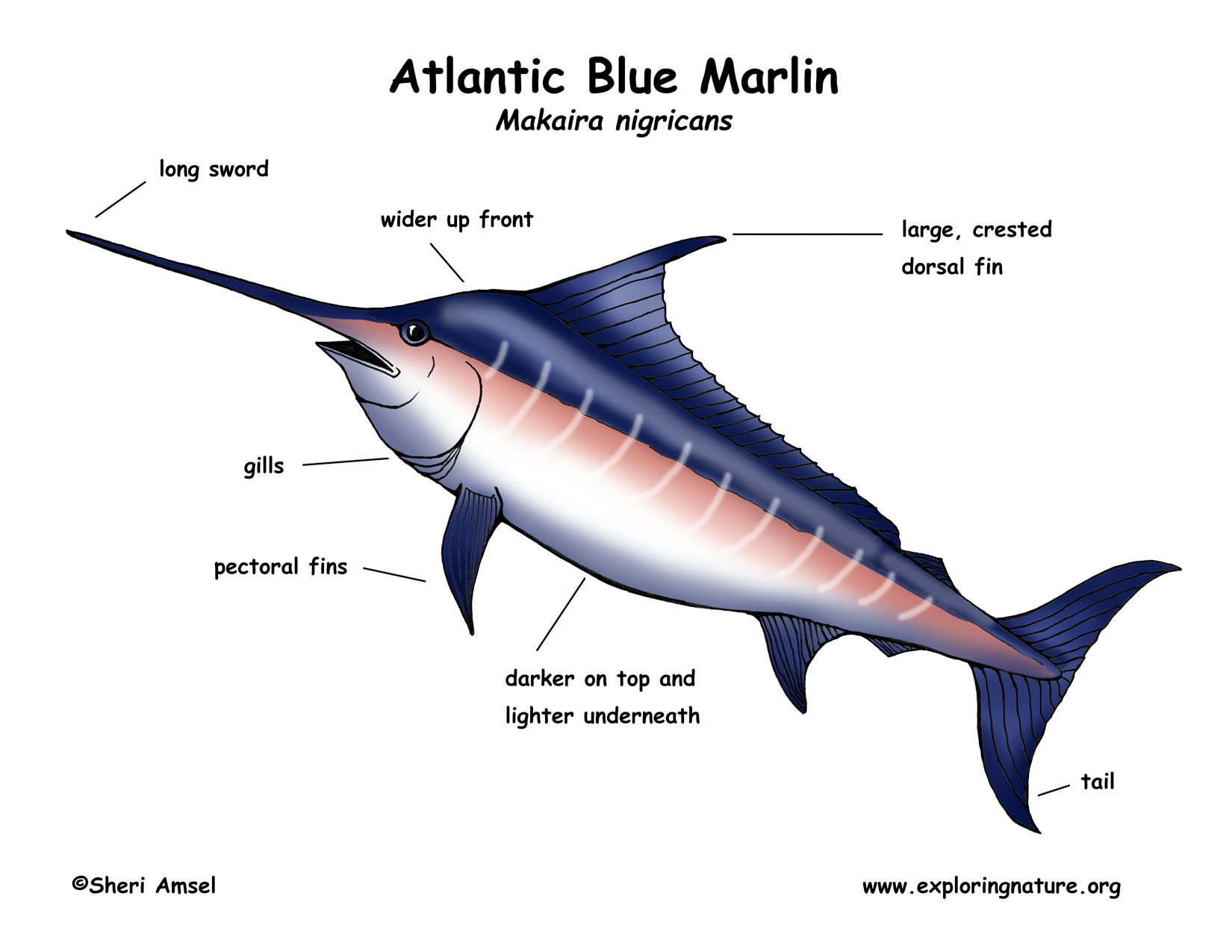
Sources:
- https://www.engadget.com/soft-cheetah-robot-flexible-spine-ncsu-180005178.html
- https://blog.padi.com/2015/11/16/the-fastest-fish-in-the-ocean/
Below is a demo of how the LEAP softbot differs from other designs.




Responses